TECH M
TECH M
코딩 없이 사람 따라 배우는 로봇 개발
근육 표면 근전도 신호로 사람 움직임을 학습하는 로봇

국내 연구진이 사람 움직임을 그대로 흉내 낼 수 있는 로봇 학습법을 개발해 로봇 기술이 한층 앞당겨질 전망이다.
한국과학기술연구원(KIST) 지능로봇연구단 김기훈 박사팀이 표면 근전도 신호를 이용해 로봇이 사람 움직임을 유연하게 학습하는 방법을 개발해, 로봇이 마치 축구 선수처럼 떨어지는 공을 트래핑하는데 성공했다고 19일 밝혔다.
최근 등장한 유연한 로봇은 기존 단단한 로봇과 달리 사람 근육이나 관절처럼 유연한 탄력을 가져 새로운 로봇 시대를 열고 있다. 유연한 로봇은 마치 사람처럼 달리고, 점프하며 장애물을 넘고, 스포츠를 함께 즐길 수 있을 것으로 기대하고 있다. 그런데 결정적인 문제가 있다. 유연한 로봇에게 실제 움직임으로 가르쳐 줄 방법을 아직 개발하지 못한 것이다.
KIST 연구팀은 유연한 로봇에게 사람 생체 근육 신호를 이용해 새로운 동작을 직접 가르칠 수 있는 기술을 최초로 개발했다. 사람이 운동을 할 때 발생하는 근육의 전기 신호인 표면 근전도 신호를 활용, 로봇에게 자세뿐만 아니라 유연성을 함께 알 수 있도록 해, 사람이 운동을 직접 로봇에게 시연하며 가르칠 수 있게 만들었다.
KIST 김기훈 박사팀은 이렇게 개발한 로봇 학습법으로 로봇이 마치 축구 선수처럼 빠르게 떨어지는 공을 단단한 부분 위에 공이 크게 튀지 않도록 트래핑하는 기술을 학습시키는데 성공했다.
연구팀은 사람 팔에 표면 근전도 센서를 부착해 위아래로 빠르게 움직이는 로봇 위치와 유연성 두 가지를 동시에 제어할 수 있게 했다. 또 빠르게 떨어지는 공을 보고 사람이 직접 로봇에게 시연하며 트래핑하는 방법을 학습시켰다. 이렇게 학습한 로봇은 사람 없이도 떨어지는 공을 능숙하게 트래핑하는데 성공했다.
이번 연구 성과는 유연한 로봇 작업을 수학적으로 계획적으로 프로그래밍하지 않고 사람이 직관적으로 직접 학습시킬 수 있어 주목받고 있다. 이에 따라 로봇과 사람의 상호작용을 발전시켜 로봇을 생활 속으로 한 발짝 더 가깝게 만들 수 있을 것으로 기대된다.
KIST 김기훈 박사는 “로봇에게 사람이 갖고 있는 다양하고 능숙한 기술을 학습시킬 수 있어, 앞으로 로봇과 사람이 상호작용하는데 크게 기여할 것”이라고 밝혔다.
이번 연구결과는 제어분야 국제 저널인 ‘IEEE Transactions on Industrial Informatics’ 최신호(VOL.15, 2월호)에 게재됐다.
[테크M =박응서 기자(gopoong@techm.kr)]







-
 '전자정부 名家' LG CNS, 1200억 '행복e음' 사업 수주로 자존심 회복할까공공 소프트웨어(SW) 사업의 강자 LG CNS가 올해 공공시장 첫 '대어'로 꼽히는 보건복지부 차세대 사회보장정보시스템(행복e음) 구축 사업에 출사표를 던졌다.17일 업계에 따르면 LG CNS는 이날 행복e음 사업 재입찰에 제안서를 제출했다.행복e음 사업은 지난 2009년 복지부가 각종 사회복지 급여 및 서비스 지원 대상자의 자격과 이력에 관한 정보를 통합 관리하기 위해 구축한 시스템을 현대화 하는 사업이다. 올해부터 3년간 약 1220억원이 투입된다.이 사업은 지난 3일 첫 입찰 공고를 마감했으나 무2020-03-17 16:54:47테크M 남도영 기자
'전자정부 名家' LG CNS, 1200억 '행복e음' 사업 수주로 자존심 회복할까공공 소프트웨어(SW) 사업의 강자 LG CNS가 올해 공공시장 첫 '대어'로 꼽히는 보건복지부 차세대 사회보장정보시스템(행복e음) 구축 사업에 출사표를 던졌다.17일 업계에 따르면 LG CNS는 이날 행복e음 사업 재입찰에 제안서를 제출했다.행복e음 사업은 지난 2009년 복지부가 각종 사회복지 급여 및 서비스 지원 대상자의 자격과 이력에 관한 정보를 통합 관리하기 위해 구축한 시스템을 현대화 하는 사업이다. 올해부터 3년간 약 1220억원이 투입된다.이 사업은 지난 3일 첫 입찰 공고를 마감했으나 무2020-03-17 16:54:47테크M 남도영 기자 -
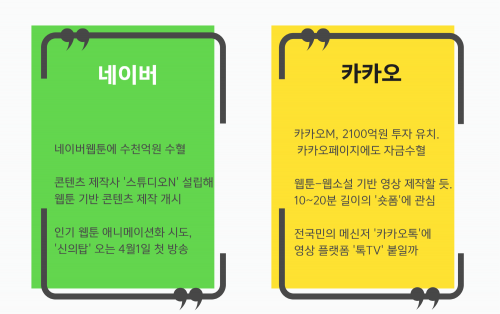 네이버 vs 카카오, 포털-메신저 이은 3라운드... 링은 '콘텐츠'#수천억 자금으로 뭘 만들까#넷플릭스 잡을 수 있을까#톡TV-네이버TV 경쟁 볼만할 듯국내 대표 인터넷 맞수 기업 네이버와 카카오의 세번재 경쟁 무대 막이 올랐다. 포털과 메신저 플랫폼에서 치열하게 경쟁해온 두 기업의 3라운드 링은 '콘텐츠'다. 이미 양사는 콘텐츠 자회사에 수천억원의 자금을 쌓아놨다. 올해부터 본격적으로 콘텐츠 양산에 돌입한다. 콘텐츠 주도권 경쟁의 전초전은 이미 시작됐다.◆실탄 마련한 카카오M, 직접 콘텐츠 제작 개시카카오는 지난 16일 콘텐츠 자회사 카카오M이 3자 배정 유상증자2020-03-17 15:53:45테크M 허준 기자
네이버 vs 카카오, 포털-메신저 이은 3라운드... 링은 '콘텐츠'#수천억 자금으로 뭘 만들까#넷플릭스 잡을 수 있을까#톡TV-네이버TV 경쟁 볼만할 듯국내 대표 인터넷 맞수 기업 네이버와 카카오의 세번재 경쟁 무대 막이 올랐다. 포털과 메신저 플랫폼에서 치열하게 경쟁해온 두 기업의 3라운드 링은 '콘텐츠'다. 이미 양사는 콘텐츠 자회사에 수천억원의 자금을 쌓아놨다. 올해부터 본격적으로 콘텐츠 양산에 돌입한다. 콘텐츠 주도권 경쟁의 전초전은 이미 시작됐다.◆실탄 마련한 카카오M, 직접 콘텐츠 제작 개시카카오는 지난 16일 콘텐츠 자회사 카카오M이 3자 배정 유상증자2020-03-17 15:53:45테크M 허준 기자 -
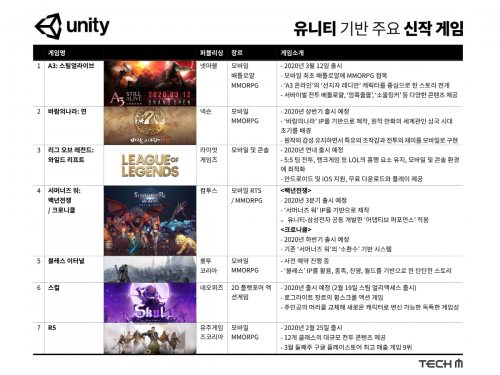 [템 사이트] 게임 하면 유니티! 2020년 기대되는 유니티 기반 게임은?연일 쏟아지는 신작 소식이 게이머들을 설레게 하고 있습니다. 남다른 스케일을 자랑하는 게임업체들의 대형 신작은 물론 독특한 게임성을 내세운 게임까지, 게이머들의 다양한 취향을 만족시킬만한 다양한 신작게임들이 많습니다.오늘은 특히 유니티 엔진을 기반으로 한 신작 게임들을 엄선해서 소개할까 합니다. 유니티는 이미 전세계 수백만명의 게임 개발자들이 사용하는 유명한 게임엔진입니다. 최신 버전의 엔진 '유니티 2019.3' 업데이트를 통해 260가지가 넘는 개선사항과 신규 기능이 포함돼 진일보한 고성능 그래픽과 최적화 기2020-03-17 15:30:39테크M 허준 기자
[템 사이트] 게임 하면 유니티! 2020년 기대되는 유니티 기반 게임은?연일 쏟아지는 신작 소식이 게이머들을 설레게 하고 있습니다. 남다른 스케일을 자랑하는 게임업체들의 대형 신작은 물론 독특한 게임성을 내세운 게임까지, 게이머들의 다양한 취향을 만족시킬만한 다양한 신작게임들이 많습니다.오늘은 특히 유니티 엔진을 기반으로 한 신작 게임들을 엄선해서 소개할까 합니다. 유니티는 이미 전세계 수백만명의 게임 개발자들이 사용하는 유명한 게임엔진입니다. 최신 버전의 엔진 '유니티 2019.3' 업데이트를 통해 260가지가 넘는 개선사항과 신규 기능이 포함돼 진일보한 고성능 그래픽과 최적화 기2020-03-17 15:30:39테크M 허준 기자