TECH M
TECH M
[ROBO TECH] 원격 공동 작업 로봇 ‘퓨전’
ROBOT TODAY 로봇 시장 트렌드

[테크M=장길수 IT컬럼니스트]
최근 일본 게이오대 야멘 사라이지(YamenSaraiji) 특임강사와 도쿄대 이나미 마사히코(稻見昌彦) 교수는 원격 공동작업 로봇‘퓨전(Fusion, Full Body Surrogacy for Collaborative Communication)’을 개발했다고 발표했다.
이 로봇은 일본 ‘국립연구개발법인 과학기술진흥기구(JST)’ 지원을 받아 개발됐다. 연구진은 지난 8월 12일 캐나다 밴쿠버에서 열린 ‘시그래프 (SIGGRAPH)2018’에서 퓨전을 소개했다.
퓨전은 기존 텔레프레전스(Telepresence)로봇이나 텔레이그지스턴스(Telexistence)로봇을 확장한 개념이다. 텔레프레전스 로봇 또는 텔레이그지스턴스 로봇은 원격지에 떨어져 있는 사람이 현장에 있는 것처럼 주변을 인식하고, 사람들과 영상을 통해 대화할 수 있는 로봇이다.
하지만 원격지에 있는 사람이 실제 로봇을 통해 특정 동작을 시도할 수는 없다. 이런 로봇과 달리 퓨전은 원격지에 있는 사람이 헤드마운트디스플레이(HMD)를 착용하고 멀리 떨어져 있는 사람과 공간을 공유하면서 로봇 팔을 실제 작동시킬 수 있다.
원격지 로봇을 조종하는 기술은 그동안 여러 기관에서 연구했다. 지난 2015년 MIT 과학자들은 사람이 HMD를 착용하고 로봇 팔다리를 원격으로 제어할 수 있는 재난구조 로봇 ‘헤르메스(HERMES)’를 공개했다. 미국 UC버클리대 연구진과 로봇 과학자인 켄 골드버그(Ken Goldberg)는 ‘텔레-액터(Tele-Actor)’라는 원격 제어 로봇을 연구하기도 했다.
일본 연구진이 개발한 퓨전은 로봇 헤드와 2개 로봇 팔로 구성돼 있는 웨어러블 로봇이다. 로봇 머리 아래 부분에는 배터리 팩이 장착돼 있다. 원격지에 떨어져 있는 사람은 오큘러스(Oculus) HMD와 손에 착용하는 촉각 디바이스를 이용해로봇 착용자와 공간과 시야를 공유하면서 로봇 팔을 원격 제어할 수 있다. 로봇헤드와 로봇 팔은 각각 3자유도와 6자유도를 갖고 있으며, 로봇 팔 끝 부분에 부착돼 있는 로봇 핸드는 사용 목적에 따라 다른 것으로 교체할 수 있다.
퓨전 로봇은 ‘직접공동작업(Directed Action)’과 ‘동작교시(Enforced Posture)’, 그리고 ‘동작유도(Induced Motion)’ 같은 3가지 형태 동작을 지원한다. 직접공동작업은 원격지에 있는 사람과 현장에 있는 로봇 착용자가 로봇 팔을 이용해 작업을 공동으로 수행하는 것이다. 마치 한 사람이 4개 팔을 갖고 있는 것 같은 동작을 취할 수 있다. ‘동작 교시’는 로봇 팔과 현장에 있는 로봇 착용자의 팔을 밴드로 묶어 원격지에 있는 사람이 로봇 팔을 움직여 로봇 착용자에게 특정 동작을 가르칠 수 있다. ‘동작유도’는 원격지에 있는 사람이 로봇 팔로 현장에 있는 사람의 손을 끌고 가면서 다른 장소로 이동시킬 때 유용하다.
퓨전 로봇은 뒷부분에 배터리가 장착돼 있어 실외에서도 사용할 수 있다. 연구팀은 퓨전을 통해 원격지에 있는 사람과 현장에 있는 사람 간에 ‘신체적 융합’이 가능하다고 주장한다. 지리적으로 멀리 떨어진 상황에서도 로봇을 매개로 멀리 떨어져 있는 사람과 공동 작업을 수행할 수 있으며, 원격 학습용 플랫폼으로도 활용할 수 있다고 연구진은 설명한다.
<이 기사는 테크M 제66호(2018년 10월)에 게재됐습니다.>







-
 '전자정부 名家' LG CNS, 1200억 '행복e음' 사업 수주로 자존심 회복할까공공 소프트웨어(SW) 사업의 강자 LG CNS가 올해 공공시장 첫 '대어'로 꼽히는 보건복지부 차세대 사회보장정보시스템(행복e음) 구축 사업에 출사표를 던졌다.17일 업계에 따르면 LG CNS는 이날 행복e음 사업 재입찰에 제안서를 제출했다.행복e음 사업은 지난 2009년 복지부가 각종 사회복지 급여 및 서비스 지원 대상자의 자격과 이력에 관한 정보를 통합 관리하기 위해 구축한 시스템을 현대화 하는 사업이다. 올해부터 3년간 약 1220억원이 투입된다.이 사업은 지난 3일 첫 입찰 공고를 마감했으나 무2020-03-17 16:54:47테크M 남도영 기자
'전자정부 名家' LG CNS, 1200억 '행복e음' 사업 수주로 자존심 회복할까공공 소프트웨어(SW) 사업의 강자 LG CNS가 올해 공공시장 첫 '대어'로 꼽히는 보건복지부 차세대 사회보장정보시스템(행복e음) 구축 사업에 출사표를 던졌다.17일 업계에 따르면 LG CNS는 이날 행복e음 사업 재입찰에 제안서를 제출했다.행복e음 사업은 지난 2009년 복지부가 각종 사회복지 급여 및 서비스 지원 대상자의 자격과 이력에 관한 정보를 통합 관리하기 위해 구축한 시스템을 현대화 하는 사업이다. 올해부터 3년간 약 1220억원이 투입된다.이 사업은 지난 3일 첫 입찰 공고를 마감했으나 무2020-03-17 16:54:47테크M 남도영 기자 -
 네이버 vs 카카오, 포털-메신저 이은 3라운드... 링은 '콘텐츠'#수천억 자금으로 뭘 만들까#넷플릭스 잡을 수 있을까#톡TV-네이버TV 경쟁 볼만할 듯국내 대표 인터넷 맞수 기업 네이버와 카카오의 세번재 경쟁 무대 막이 올랐다. 포털과 메신저 플랫폼에서 치열하게 경쟁해온 두 기업의 3라운드 링은 '콘텐츠'다. 이미 양사는 콘텐츠 자회사에 수천억원의 자금을 쌓아놨다. 올해부터 본격적으로 콘텐츠 양산에 돌입한다. 콘텐츠 주도권 경쟁의 전초전은 이미 시작됐다.◆실탄 마련한 카카오M, 직접 콘텐츠 제작 개시카카오는 지난 16일 콘텐츠 자회사 카카오M이 3자 배정 유상증자2020-03-17 15:53:45테크M 허준 기자
네이버 vs 카카오, 포털-메신저 이은 3라운드... 링은 '콘텐츠'#수천억 자금으로 뭘 만들까#넷플릭스 잡을 수 있을까#톡TV-네이버TV 경쟁 볼만할 듯국내 대표 인터넷 맞수 기업 네이버와 카카오의 세번재 경쟁 무대 막이 올랐다. 포털과 메신저 플랫폼에서 치열하게 경쟁해온 두 기업의 3라운드 링은 '콘텐츠'다. 이미 양사는 콘텐츠 자회사에 수천억원의 자금을 쌓아놨다. 올해부터 본격적으로 콘텐츠 양산에 돌입한다. 콘텐츠 주도권 경쟁의 전초전은 이미 시작됐다.◆실탄 마련한 카카오M, 직접 콘텐츠 제작 개시카카오는 지난 16일 콘텐츠 자회사 카카오M이 3자 배정 유상증자2020-03-17 15:53:45테크M 허준 기자 -
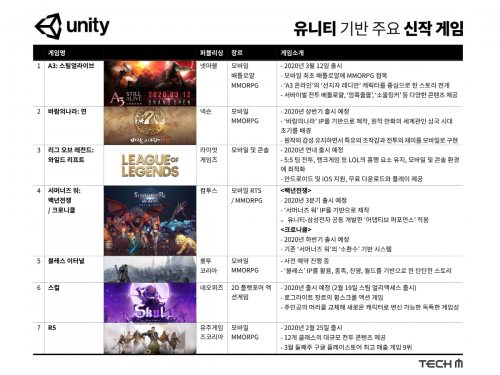 [템 사이트] 게임 하면 유니티! 2020년 기대되는 유니티 기반 게임은?연일 쏟아지는 신작 소식이 게이머들을 설레게 하고 있습니다. 남다른 스케일을 자랑하는 게임업체들의 대형 신작은 물론 독특한 게임성을 내세운 게임까지, 게이머들의 다양한 취향을 만족시킬만한 다양한 신작게임들이 많습니다.오늘은 특히 유니티 엔진을 기반으로 한 신작 게임들을 엄선해서 소개할까 합니다. 유니티는 이미 전세계 수백만명의 게임 개발자들이 사용하는 유명한 게임엔진입니다. 최신 버전의 엔진 '유니티 2019.3' 업데이트를 통해 260가지가 넘는 개선사항과 신규 기능이 포함돼 진일보한 고성능 그래픽과 최적화 기2020-03-17 15:30:39테크M 허준 기자
[템 사이트] 게임 하면 유니티! 2020년 기대되는 유니티 기반 게임은?연일 쏟아지는 신작 소식이 게이머들을 설레게 하고 있습니다. 남다른 스케일을 자랑하는 게임업체들의 대형 신작은 물론 독특한 게임성을 내세운 게임까지, 게이머들의 다양한 취향을 만족시킬만한 다양한 신작게임들이 많습니다.오늘은 특히 유니티 엔진을 기반으로 한 신작 게임들을 엄선해서 소개할까 합니다. 유니티는 이미 전세계 수백만명의 게임 개발자들이 사용하는 유명한 게임엔진입니다. 최신 버전의 엔진 '유니티 2019.3' 업데이트를 통해 260가지가 넘는 개선사항과 신규 기능이 포함돼 진일보한 고성능 그래픽과 최적화 기2020-03-17 15:30:39테크M 허준 기자