TECH M
TECH M
[자율주행차 시승기] 망가진 신호등, 불법유턴차 피해 씽씽
자율주행차 직접 타보니

일산 킨텍스 근방 교차로. 왕복 10차선의 넓은 도로가 교차하는 곳이다. 직진 신호가 들어오자 운전석에 앉은 연구원이 “출발”이라고 신호하며 핸들의 작은 버튼을 눌렀다.
뒷좌석에서 차량에 설치된 모니터를 바라보던 또 다른 연구원도 ‘딸깍’ 하고 마우스를 클릭한다. 순간 서서히 차량이 움직이기 시작했다.
차량에 탑승한 4명 가운데 누구도 차량을 조작하지 않았다.
이경수 서울대 교수 연구팀에서 제작한 자율주행자동차는 경쾌하게 속도를 높이며 대로를 달려 나갔다. 하지만 가속은 길지 않았다. 안전을 위해 차량의 최고 속도를 도로의 제한속도보다 시속 10㎞ 느리게 설정했기 때문이다.
넓고 한산한 도로를 자율주행차는 시속 50㎞로 달렸다.
차선 변경, 과속방지턱도 문제 없어
자율주행차는 이내 차선을 1차로로 변경했다. 자율주행차는 1차선을 따라 1㎞ 이상을 직진했다. 차선 변경도 직진도 문제는 없었다.
작동하지 않는 신호등, 불법 유턴 차량 등이 있었지만 차량 운행을 방해하진 않았다. 과속방지턱도 감속하면서 넘어갔다.
아쉬운 점이라면 과속방지턱을 좀 더 부드럽게 넘어갔으면 하는 취향의 차이 정도.
차량은 사전에 계획된 경로를 따라 좌회전을 해 이면도로로 접어들었다. 이면도로는 제한 속도가 시속 30㎞에 불과해 차량 속도는 시속 20㎞로 뚝 떨어졌다.
도로가 왕복 2차로에 불과하지만 다른 차량은 물론 시야를 가리는 건물도 거의 없어 느린 속도는 더 답답하게 느껴졌다.
1차선 막은 레미콘 우회는 사람이
곧 이어 자율주행차는 어려움에 직면했다. 편도 1차로 도로를 주변 공사장에 투입될 여러 대의 레미콘 차량이 막고 있었다. 피해가기 위해서는 중앙선을 넘어가야 했다.
운전석에 앉은 연구원은 핸들을 잡고 수동운전을 시작했다.
“중앙선을 넘지 못하도록 설정해둬서 여기는 수동으로 운전할 수밖에 없어요.”
연구원은 자율주행으로 피해가게 할 수 있지만 일반인을 위한 시연 차량이라 위험요소는 최대한 배제한 상태라고 설명했다.
이렇게 첫 번째 자율주행차 시승이 끝났다. 실제 주행시간 7분 정도에 교차로에서의 신호등 대기 시간을 고려하면 10~15분 정도 되는 코스였다.
같은 코스로 2차례 더 자율주행차로 달렸다. 2번째 주행에서는 레미콘 차량이 없었다. 당연하다는 듯 아무 일 없이 해당 구간을 지나갔다.
문제는 그 직후. 자율주행차는 이면도로에서 큰 도로로 진입을 시도했다. 이면도로로 진입하며 좌회전할 때보다 작은 반경을 그리며 우회전을 해야 했다.
자율주행차는 여러 차례 짧게 끊어서 우회전했다. 차량이 진동한다고 느껴질 정도로 미세한 흔들림이 이어졌다. 회전 차량을 위한 차선이 그려지지 않은 곳에서 회전하기 어렵기 때문이었다.
뒷좌석에 앉은 또 다른 연구원은 “시연 도로에 최적화하면 30분에서 1시간이면 해결할 수 있다”면서도 “모든 도로와 상황에서 부드럽게 회전하는 연구는 또 다른 큰 연구과제”라고 설명했다.
사실 시승 과정에서 서울대 자율주행차는 교차로에서 사람이 직접 운전해 지나가는 한계도 보였다.
교차로를 지나기 위해서는 모든 방향으로 더 넓은 범위까지 인식할 수 있는 센서가 필요하지만 서울대 자율주행차는 전방 90도 정도만 정밀하게 인식할 수 있기 때문이다. 차량의 속도를 많이 제한한 것은 인식 범위가 좁은 만큼 위험 요소를 조금이라도 줄이기 위한 목적도 있다.
현재 완성된 서울대 자율주행차는 지난해 5월 고속도로 자율주행에 성공한 차량이다.
차량에는 전방 가운데에 레이더와 레이저 스캐너 하나씩, 후방에는 좌우 모서리에 레이더가 하나씩 들어가 있다. 고속도로는 모든 차량이 앞으로 운행하는 제한된 환경이라 정밀하게 주변 사물을 인식할 수 있는 레이저 스캐너가 정면에만 있는 것이다.
하지만 도심 주행은 전방은 물론 좌우와 후방 등 모든 방향의 차량과 장애물을 인식해야 한다. 그만큼 더 많은 센서와 데이터 처리능력이 필요하다.
고속도로 주행에 최적화해 센서를 설치한 차량으로 도심을 운행하기에는 한계가 있는 것이다.

인식 성능 높여 일반도로 주행 추진
서울대 연구팀은 성능을 크게 높인 2호 차량을 제작 중이다.
270도까지 볼 수 있는 레이저 스캐너가 후방 좌우에 장착된다. 1호차에서는 불가능한 후방과 측면 인식까지 가능해지는 것이다.
내년까지 일반도로에서도 자율주행이 가능한 기술을 개발할 계획이다.
가장 큰 걸림돌은 센서 등 기반 기술이다. 현재도 자율주행차는 쉽게 만들 수 있다고 말하는 사람들이 있다. 고가의 센서 장비를 활용하면 어렵지 않게 자율주행차를 만들 수 있다는 것이다.
문제는 이 경우 상용화가 거의 불가능하다는 것. 상용차로 자율주행 수준이 가장 높다는 테슬라의 차도 가격이 1억 원이 넘는다.
결국 자율주행기술을 개발하더라도 센서의 가격이 발목을 잡을 수 있다.
이경수 교수는 “연구실에서 개발하는 기술은 세계 학회에서 우수 논문상을 받을 정도로 수준이 높다”면서도 “센서 카메라 같이 주위를 인지하는 요소 기술이 부족하지만 1~2년 집중한다고 되는 것은 아니다”라고 말했다.
어려움을 해결하기 위해 국내 기업들 간의 협력을 강화할 계획이다.
이 교수는 ‘산학연 컨소시엄을 만들고 있다”며 “판교제조시티에 관련 업체들이 참여해 시스템을 어떻게 만들지, 테스트와 확장 등을 계획하고 있다”고 설명했다.
[테크M = 도강호 기자(gangdogi@techm.kr)]
<본 기사는 테크M 제48호(2017년 4월) 기사입니다>







-
 '전자정부 名家' LG CNS, 1200억 '행복e음' 사업 수주로 자존심 회복할까공공 소프트웨어(SW) 사업의 강자 LG CNS가 올해 공공시장 첫 '대어'로 꼽히는 보건복지부 차세대 사회보장정보시스템(행복e음) 구축 사업에 출사표를 던졌다.17일 업계에 따르면 LG CNS는 이날 행복e음 사업 재입찰에 제안서를 제출했다.행복e음 사업은 지난 2009년 복지부가 각종 사회복지 급여 및 서비스 지원 대상자의 자격과 이력에 관한 정보를 통합 관리하기 위해 구축한 시스템을 현대화 하는 사업이다. 올해부터 3년간 약 1220억원이 투입된다.이 사업은 지난 3일 첫 입찰 공고를 마감했으나 무2020-03-17 16:54:47테크M 남도영 기자
'전자정부 名家' LG CNS, 1200억 '행복e음' 사업 수주로 자존심 회복할까공공 소프트웨어(SW) 사업의 강자 LG CNS가 올해 공공시장 첫 '대어'로 꼽히는 보건복지부 차세대 사회보장정보시스템(행복e음) 구축 사업에 출사표를 던졌다.17일 업계에 따르면 LG CNS는 이날 행복e음 사업 재입찰에 제안서를 제출했다.행복e음 사업은 지난 2009년 복지부가 각종 사회복지 급여 및 서비스 지원 대상자의 자격과 이력에 관한 정보를 통합 관리하기 위해 구축한 시스템을 현대화 하는 사업이다. 올해부터 3년간 약 1220억원이 투입된다.이 사업은 지난 3일 첫 입찰 공고를 마감했으나 무2020-03-17 16:54:47테크M 남도영 기자 -
 네이버 vs 카카오, 포털-메신저 이은 3라운드... 링은 '콘텐츠'#수천억 자금으로 뭘 만들까#넷플릭스 잡을 수 있을까#톡TV-네이버TV 경쟁 볼만할 듯국내 대표 인터넷 맞수 기업 네이버와 카카오의 세번재 경쟁 무대 막이 올랐다. 포털과 메신저 플랫폼에서 치열하게 경쟁해온 두 기업의 3라운드 링은 '콘텐츠'다. 이미 양사는 콘텐츠 자회사에 수천억원의 자금을 쌓아놨다. 올해부터 본격적으로 콘텐츠 양산에 돌입한다. 콘텐츠 주도권 경쟁의 전초전은 이미 시작됐다.◆실탄 마련한 카카오M, 직접 콘텐츠 제작 개시카카오는 지난 16일 콘텐츠 자회사 카카오M이 3자 배정 유상증자2020-03-17 15:53:45테크M 허준 기자
네이버 vs 카카오, 포털-메신저 이은 3라운드... 링은 '콘텐츠'#수천억 자금으로 뭘 만들까#넷플릭스 잡을 수 있을까#톡TV-네이버TV 경쟁 볼만할 듯국내 대표 인터넷 맞수 기업 네이버와 카카오의 세번재 경쟁 무대 막이 올랐다. 포털과 메신저 플랫폼에서 치열하게 경쟁해온 두 기업의 3라운드 링은 '콘텐츠'다. 이미 양사는 콘텐츠 자회사에 수천억원의 자금을 쌓아놨다. 올해부터 본격적으로 콘텐츠 양산에 돌입한다. 콘텐츠 주도권 경쟁의 전초전은 이미 시작됐다.◆실탄 마련한 카카오M, 직접 콘텐츠 제작 개시카카오는 지난 16일 콘텐츠 자회사 카카오M이 3자 배정 유상증자2020-03-17 15:53:45테크M 허준 기자 -
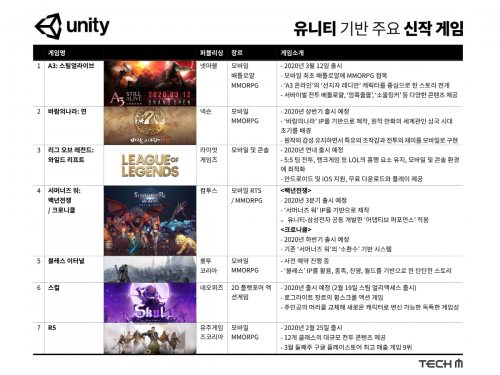 [템 사이트] 게임 하면 유니티! 2020년 기대되는 유니티 기반 게임은?연일 쏟아지는 신작 소식이 게이머들을 설레게 하고 있습니다. 남다른 스케일을 자랑하는 게임업체들의 대형 신작은 물론 독특한 게임성을 내세운 게임까지, 게이머들의 다양한 취향을 만족시킬만한 다양한 신작게임들이 많습니다.오늘은 특히 유니티 엔진을 기반으로 한 신작 게임들을 엄선해서 소개할까 합니다. 유니티는 이미 전세계 수백만명의 게임 개발자들이 사용하는 유명한 게임엔진입니다. 최신 버전의 엔진 '유니티 2019.3' 업데이트를 통해 260가지가 넘는 개선사항과 신규 기능이 포함돼 진일보한 고성능 그래픽과 최적화 기2020-03-17 15:30:39테크M 허준 기자
[템 사이트] 게임 하면 유니티! 2020년 기대되는 유니티 기반 게임은?연일 쏟아지는 신작 소식이 게이머들을 설레게 하고 있습니다. 남다른 스케일을 자랑하는 게임업체들의 대형 신작은 물론 독특한 게임성을 내세운 게임까지, 게이머들의 다양한 취향을 만족시킬만한 다양한 신작게임들이 많습니다.오늘은 특히 유니티 엔진을 기반으로 한 신작 게임들을 엄선해서 소개할까 합니다. 유니티는 이미 전세계 수백만명의 게임 개발자들이 사용하는 유명한 게임엔진입니다. 최신 버전의 엔진 '유니티 2019.3' 업데이트를 통해 260가지가 넘는 개선사항과 신규 기능이 포함돼 진일보한 고성능 그래픽과 최적화 기2020-03-17 15:30:39테크M 허준 기자