TECH M
×
TECH M
[MIT 10대혁신기술] ⑤서로 가르치는 로봇
2016-04-20MIT테크놀로지리뷰

로봇이 스스로 새로운 지식을 습득하고 서로 공유할 수 있다면 어떨까?
● 무엇이 혁신인가?
새로 배운 내용을 다른 로봇과 공유하기 위해 클라우드로 전송
● 왜 혁신인가?
종류별로 기계를 각각 프로그래밍하지 않아도 된다면 로봇공학이 더욱 빨리 발전할 수 있다.
● 누가 주도하나?
브레인오브싱즈의 아슈토시 삭세나, 브라운대의 스테파니 텔렉스, 캘리포니아대 버클리캠퍼스의 피터 아빌, 켄 골드버그, 세르게이 레빈, 독일 다름슈타트공대의 얀 피터스
창고에서 물건을 포장하고 몸져누운 환자를 돕거나 전쟁터에서 군인을 돕는 등의 일거리를 로봇에게 맡길 수 있다면 좋겠지만 아직은 그럴 수 없다.
로봇은 평범한 물체를 인식할 수도 쉽게 다루지도 못하기 때문이다. 보통 사람은 양말을 개거나 유리잔을 들어 올리는 것을 어려워하지 않는다.
어린 시절이라 부르는 ‘빅데이터 수집 과정’을 거쳤기 때문이라는 게 스테파니 텔릭스 브라운대 컴퓨터공학과 교수의 설명이다.
로봇이 사람처럼 일상 활동을 하려면 물체를 잡고 조절하는 법에 대한 방대한 데이터를 습득해야 한다. 그런데 어디서 그런 데이터를 받을 수 있을까?
일반적으로 프로그래밍을 통해 가능한데, 여기에는 많은 정성이 들어간다.
그러나 로봇이 서로 정보를 공유할 수 있다면 그보다 좋을 수 없을 것이다.
이것이 바로 텔렉스의 ‘백만 사물 익히기 프로젝트’의 바탕이 되는 이론이다.
목표는 전세계 연구용 로봇이 그릇부터 바나나까지 간단한 물체를 찾아 다루는 법을 배우고, 그 데이터를 클라우드에 업로드 해 다른 로봇이 그 정보를 분석하고 사용하도록 하는 것이다.
로드아일랜드주 프로비던스에 있는 텔렉스연구소에는 유치원처럼 발랄한 분위기가 흐른다.
필자가 방문한 날 리싱크로보틱스가 만든 산업용 로봇, 백스터가 커다란 블럭 사이에 서서 작은 머리빗을 스캔하고 있었다.
로봇은 소리를 내며 물체 위로 팔을 앞뒤로 움직이면서 카메라로 사진을 여러 장 찍고 적외선 센서로 깊이를 측정했다.
그리고 집게 모양의 손으로 빗을 들어 올리려 다양한 방법을 시도했다. 물체를 공중으로 들어 올린 후에는 흔들어서 제대로 잡고 있는지 확인했다. 이제 로봇이 들어 올릴 수 있는 물건이 하나 더 생겼다.
로봇은 양손에 다른 물건을 들고 24시간 내내 일할 수 있다.
텔렉스 교수와 대학원생 존 오벌린은 아동용 신발, 플라스틱 배, 고무오리 장난감, 마늘다지기 등 조리도구와 텔렉스 교수의 3살배기 아들이 사용하던 빨대컵까지 200종의 다양한 물체에 대한 데이터를 수집, 공유해왔다.
다른 과학자들도 그들의 로봇 데이터를 이용해 기여할 수 있다.
텔렉스 교수는 모든 데이터를 취합, 로봇이 수백만 가지 다양한 물건을 다루는 방법에 대한 정보 보관소를 구축할 수 있을 것으로 기대한다.
언젠가 로봇이 복잡한 책장 앞에 서서 “펜을 발견하고 집어 올릴 수 있을 것”이라고 텔렉스는 말한다.
이러한 프로젝트가 가능한 것은 많은 연구용 로봇이 ROS(로봇운영체제)란 표준화된 프로그래밍 체계를 사용하는 덕분이다.
기계가 특정 과제를 학습하면 해당 데이터를 다른 로봇과 공유하고, 그 로봇은 피드백을 받아 다음 기계를 위해 더욱 정교화 할 수 있다.
텔렉스 교수는 물체를 인식하고 집어 드는 방법에 대한 데이터를 평범한 음악 파일 크기인 5~10MB로 압축할 수 있다고 한다.
텔렉스 교수는 로봇이 다른 로봇의 경험을 바탕으로 학습하는 방식을 보여준 ‘로보브레인’ 프로젝트의 초창기 멤버였다.
그녀와 함께 일했던 당시 아슈토시 삭세나 코넬대 교수는 자신의 PR2 로봇에게 작은 컵을 들어 식탁 위에 놓는 법을 가르쳤다.

| (스테파니 텔렉스 브라운대 교수와 백스터 로봇) |

| (물체를 들어 올리고 잡는 최적의 방법을 결정할 때마다 로봇은 관련 데이터를 다른 로봇들이 조회할 수 있는 형식으로 저장한다.) |
그리고 브라운대에 있던 텔렉스 교수가 클라우드에서 그 정보를 받아 물리적으로 구조가 다른 백스터가 다른 환경에서 같은 과제를 수행하도록 훈련시켰다.
브레인오브싱즈란 스타트업을 이끌고 있는 삭세나 교수는 지금도 대단한 발전이지만 앞으로 5~10년 후에는 ‘로봇 역량의 폭발’을 기대할 수 있다고 말한다.
“더 많은 연구자들이 클라우드 기반 지식을 확장하고 정교화하면서 로봇에게 필요한 모든 정보에 즉시 접근할 수 있을 것이다.”
번역 김은혜
<본 기사는 테크M 제36호(2016년4월) 기사입니다>







-
 '전자정부 名家' LG CNS, 1200억 '행복e음' 사업 수주로 자존심 회복할까공공 소프트웨어(SW) 사업의 강자 LG CNS가 올해 공공시장 첫 '대어'로 꼽히는 보건복지부 차세대 사회보장정보시스템(행복e음) 구축 사업에 출사표를 던졌다.17일 업계에 따르면 LG CNS는 이날 행복e음 사업 재입찰에 제안서를 제출했다.행복e음 사업은 지난 2009년 복지부가 각종 사회복지 급여 및 서비스 지원 대상자의 자격과 이력에 관한 정보를 통합 관리하기 위해 구축한 시스템을 현대화 하는 사업이다. 올해부터 3년간 약 1220억원이 투입된다.이 사업은 지난 3일 첫 입찰 공고를 마감했으나 무2020-03-17 16:54:47테크M 남도영 기자
'전자정부 名家' LG CNS, 1200억 '행복e음' 사업 수주로 자존심 회복할까공공 소프트웨어(SW) 사업의 강자 LG CNS가 올해 공공시장 첫 '대어'로 꼽히는 보건복지부 차세대 사회보장정보시스템(행복e음) 구축 사업에 출사표를 던졌다.17일 업계에 따르면 LG CNS는 이날 행복e음 사업 재입찰에 제안서를 제출했다.행복e음 사업은 지난 2009년 복지부가 각종 사회복지 급여 및 서비스 지원 대상자의 자격과 이력에 관한 정보를 통합 관리하기 위해 구축한 시스템을 현대화 하는 사업이다. 올해부터 3년간 약 1220억원이 투입된다.이 사업은 지난 3일 첫 입찰 공고를 마감했으나 무2020-03-17 16:54:47테크M 남도영 기자 -
 네이버 vs 카카오, 포털-메신저 이은 3라운드... 링은 '콘텐츠'#수천억 자금으로 뭘 만들까#넷플릭스 잡을 수 있을까#톡TV-네이버TV 경쟁 볼만할 듯국내 대표 인터넷 맞수 기업 네이버와 카카오의 세번재 경쟁 무대 막이 올랐다. 포털과 메신저 플랫폼에서 치열하게 경쟁해온 두 기업의 3라운드 링은 '콘텐츠'다. 이미 양사는 콘텐츠 자회사에 수천억원의 자금을 쌓아놨다. 올해부터 본격적으로 콘텐츠 양산에 돌입한다. 콘텐츠 주도권 경쟁의 전초전은 이미 시작됐다.◆실탄 마련한 카카오M, 직접 콘텐츠 제작 개시카카오는 지난 16일 콘텐츠 자회사 카카오M이 3자 배정 유상증자2020-03-17 15:53:45테크M 허준 기자
네이버 vs 카카오, 포털-메신저 이은 3라운드... 링은 '콘텐츠'#수천억 자금으로 뭘 만들까#넷플릭스 잡을 수 있을까#톡TV-네이버TV 경쟁 볼만할 듯국내 대표 인터넷 맞수 기업 네이버와 카카오의 세번재 경쟁 무대 막이 올랐다. 포털과 메신저 플랫폼에서 치열하게 경쟁해온 두 기업의 3라운드 링은 '콘텐츠'다. 이미 양사는 콘텐츠 자회사에 수천억원의 자금을 쌓아놨다. 올해부터 본격적으로 콘텐츠 양산에 돌입한다. 콘텐츠 주도권 경쟁의 전초전은 이미 시작됐다.◆실탄 마련한 카카오M, 직접 콘텐츠 제작 개시카카오는 지난 16일 콘텐츠 자회사 카카오M이 3자 배정 유상증자2020-03-17 15:53:45테크M 허준 기자 -
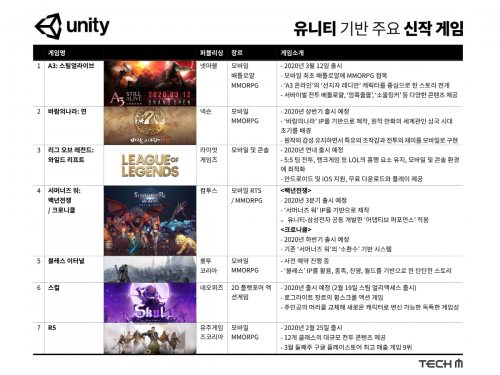 [템 사이트] 게임 하면 유니티! 2020년 기대되는 유니티 기반 게임은?연일 쏟아지는 신작 소식이 게이머들을 설레게 하고 있습니다. 남다른 스케일을 자랑하는 게임업체들의 대형 신작은 물론 독특한 게임성을 내세운 게임까지, 게이머들의 다양한 취향을 만족시킬만한 다양한 신작게임들이 많습니다.오늘은 특히 유니티 엔진을 기반으로 한 신작 게임들을 엄선해서 소개할까 합니다. 유니티는 이미 전세계 수백만명의 게임 개발자들이 사용하는 유명한 게임엔진입니다. 최신 버전의 엔진 '유니티 2019.3' 업데이트를 통해 260가지가 넘는 개선사항과 신규 기능이 포함돼 진일보한 고성능 그래픽과 최적화 기2020-03-17 15:30:39테크M 허준 기자
[템 사이트] 게임 하면 유니티! 2020년 기대되는 유니티 기반 게임은?연일 쏟아지는 신작 소식이 게이머들을 설레게 하고 있습니다. 남다른 스케일을 자랑하는 게임업체들의 대형 신작은 물론 독특한 게임성을 내세운 게임까지, 게이머들의 다양한 취향을 만족시킬만한 다양한 신작게임들이 많습니다.오늘은 특히 유니티 엔진을 기반으로 한 신작 게임들을 엄선해서 소개할까 합니다. 유니티는 이미 전세계 수백만명의 게임 개발자들이 사용하는 유명한 게임엔진입니다. 최신 버전의 엔진 '유니티 2019.3' 업데이트를 통해 260가지가 넘는 개선사항과 신규 기능이 포함돼 진일보한 고성능 그래픽과 최적화 기2020-03-17 15:30:39테크M 허준 기자